Wenzhi Bai
Affiliated with the Neurorobotics Lab @ UoM

I am a Ph.D. student in Robotics at the University of Manchester (UoM), supervised by Dr. Zhenhong Li, Prof. Andrew Weightman, and Prof. Zhengtao Ding. Before starting my Ph.D. in 2024, I gained several years of industry experience in autonomous mobile robotics, focusing on SLAM research at LDROBOT and BAIDU Apollo since 2017. I hold a B.Eng. in Mechanical Design, Manufacturing and Automation (2014) and an M.Eng. in Mechatronics Engineering (2017), both from the Huazhong University of Science and Technology (HUST), China.
My research interests span autonomous systems, particularly sensor fusion, state estimation, and 3D reconstruction. Recently, my work has focused on perception and manipulation of deformable objects, with applications in medical robotics.
news
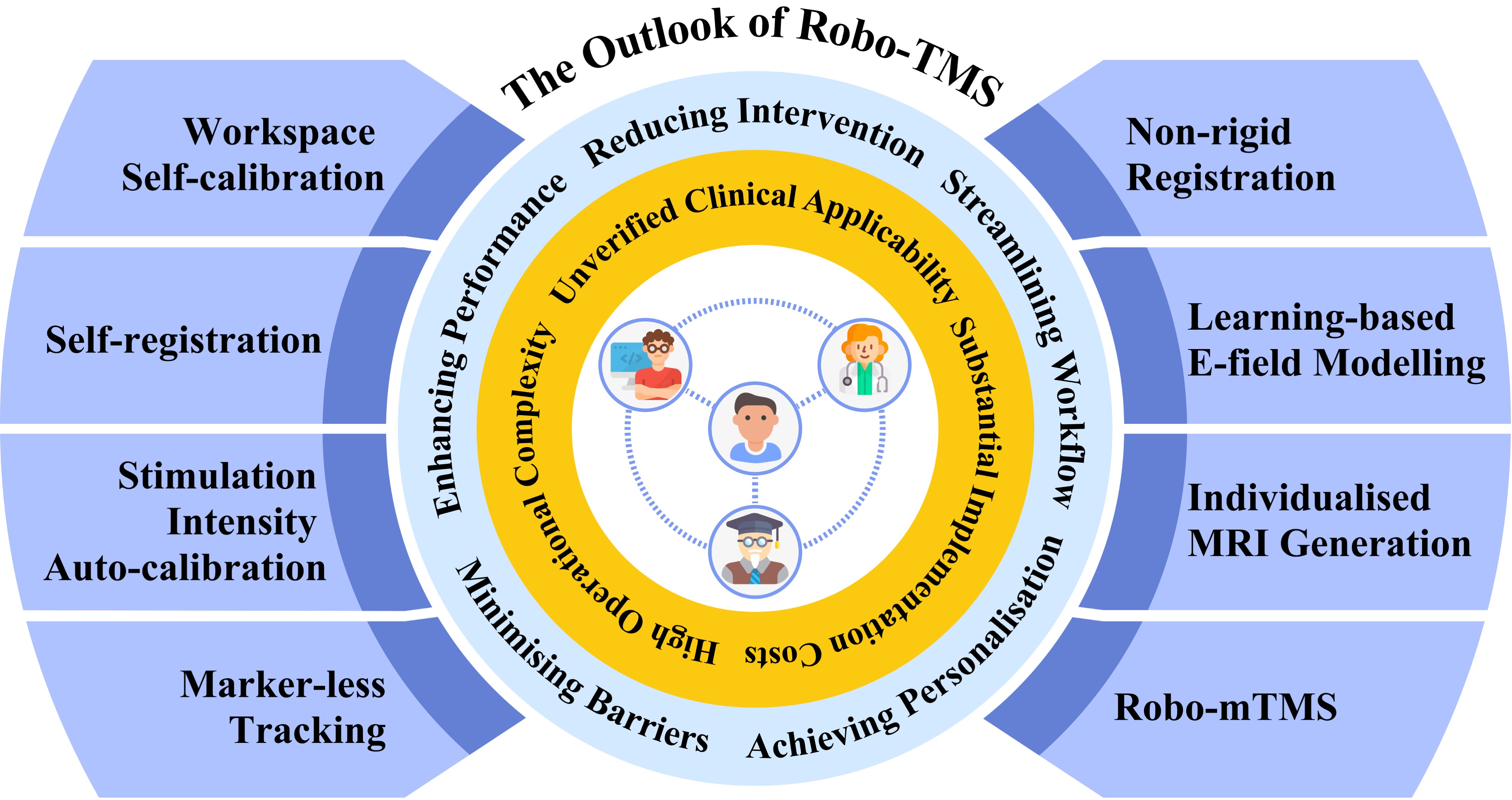
| Jun 30, 2025 | Our paper “Robot-assisted Transcranial Magnetic Stimulation (Robo-TMS): A Review” was accepted by IEEE Transactions on Neural Systems and Rehabilitation Engineering. |
|---|---|
| Nov 22, 2023 | Our paper “IMTP: Intention-Matching Trajectory Prediction for Autonomous Vehicles” received Best Conference Paper at the 29th International Conference on Mechatronics and Machine Vision in Practice (M2VIP) 2023. |
latest posts
| Jan 06, 2025 | Ubuntu Real-time Kernel |
|---|---|
| Jan 05, 2025 | Git Manual |
| Dec 20, 2024 | Franka Research 3 Environment |